

团队合照。
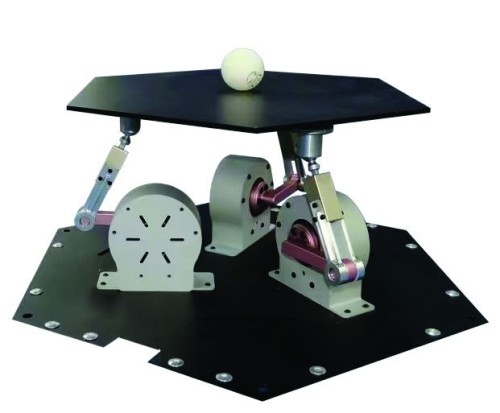
颠球机器人。本版均为受访者供图
在上海理工大学,一台以毫秒级速度颠动乒乓球的机器人,正在为医疗设备、船舶平台等复杂动态环境中的稳定性挑战提供全新解法。这个看似“玩球”的作品,其实是面向多应用场景的高动态低延时智能平衡系统,由一个本科生团队自主研发,并在第十九届“挑战杯”全国大学生课外学术科技作品竞赛中获评特等奖。
团队以跨学科协作攻克算法优化与感知融合难题,让智能设备在高速运动中依旧能稳得住、接得准,展现出青年科创力量为解决实际问题而来的初心与担当。
青年报记者 陈泳均
一场科创实验
验证平衡控制的最佳场景
“颠球机器人”带来的惊艳背后,是对动态环境下设备稳定性难题的直接回应。医疗手术中设备稍有颤动即可影响精度,船舶平台在风浪干扰下难以稳定作业,为此,一项具备强抗干扰能力的平衡控制技术尤为关键。让设备仿佛拥有“人手般”的稳定,是团队从一开始就确立的目标。项目灵感源自一场前沿技术峰会。“会上提到机器人步行、手术机器人等平衡控制领域的前沿方向”,让团队学生负责人王瀚深受启发,在和导师的讨论中,他们决定做一个能验证算法的项目。
真正让“平衡控制”与“乒乓球”产生联结的,是团队指导老师的特殊经历,这位前专业乒乓球运动员,他提出的动作节奏和状态控制经验启发了学生,“老师说‘打球讲究眼快、手快、判断准’,于是我们想到,能不能让机器人完成这种既需要节奏,又考验高动态平衡的动作?”
研发团队成员多半不会打球,反而能跳出惯性思维,用纯算法与工控逻辑优化动作。250帧高精度相机捕捉轨迹、12位压感测片感知触点,多传感器融合算法实现毫秒级响应——机械臂看到球、伸出手,比人类更快。当视频发布网络时,评论区有人惊叹“比我还稳”,这让团队首次意识到项目背后潜藏的技术价值。
“我们成员里会打乒乓球的没几个,我甚至完全不会打。”王瀚笑着说。这种跨领域的组合反而成了优势:跳出惯性思维,用纯粹的算法思维优化机械动作。团队研发的颠球机器人并非人形机器人,没有复杂的躯干与头部设计,而是通过球关节式并联机构和算法强化学习,在毫秒级别完成姿态变换。
出乎意料的是,当第一代颠球机器人的视频发布到网上时收获了大量关注。评论里有人说“这机器比我打球还稳”,也有人问“能不能用到其他领域”。这些反馈让王瀚和队友意识到,这个看似好玩的项目,背后藏着巨大的技术价值。
于是,他们继续深入打磨核心技术,自主研发出了TPVC运动补偿控制技术与高速双目视觉系统,250帧的高精度相机像眼睛一样捕捉小球轨迹,12位压感测片实时捕捉小球位置和运动轨迹,数据经多传感器融合算法处理后,毫秒内就能下达指令给双编码器一体式伺服电机,让机械臂调整姿态。“从捕捉到响应,整个过程像人类‘看到球、伸出手’一样自然,但速度是人类的好几倍。”王瀚解释道。
两次关键突破
从手动调参到机器“自己学习”
技术攻坚的道路并不轻松。项目之初,团队采用手动调参方式,每天上百次试验却收效甚微,小球要么弹飞,要么掉地。有天晚上,队友说:“能不能让机器自己学?”这个想法让大家眼前一亮。他们通过Isaac Gym部署虚拟机器人,通过深度强化学习算法,让机器人获得“学习能力”。
王瀚记得,“那段时间我们每天长时间在实验室研发和测试,深夜还在看虚拟机器人的训练数据。”王瀚说,最激动的时刻是第一次将仿真训练的策略迁移到真实机器人上:机械臂先是稳稳地颠了一下,接着又稳稳接住第二下、第三下……最终让机器人在真实环境中具备非常快的反应速度和稳定性。“那一刻,我们一起拍手欢呼、击掌,那个场景我至今难忘。”正是这次突破,让机器人拥有了自主学习的能力,不再依赖人工调试,适应不同场景的速度也快了很多。另一个难点在于感知能力:如何实现“一键停球”?这需要机器精准感知球的速度、力度变化,不然球要么弹飞,要么直接掉地上。王瀚和队友盯着算法寻找突破口,发现关键在于多传感器融合算法,他们连夜修改代码,通过代码将视觉、压力、电流等多模态数据融合,让机器人能“感知”小球的细微变化。当王瀚按下启动键,机械臂颠球几秒后,轻收臂端,让乒乓球实现了精准停留。“那一刻,我们觉得机器真的‘活’了,它能感知到球的细微变化,还能配合完成复杂动作。”
坚持贯穿着整个研发过程。最初,团队只有王瀚和另外两名队友,缺人,也缺设备。王瀚回忆道,“最开始没有3D打印机,哪怕只是一个螺丝孔位置画错或者需要调整,都可能要重新加工,验证,往往一等就是一周。”改变始于实验室购入的第一台3D打印机。“有了它,我们当天设计零件,当天就能打印出来测试,大大加快迭代速度。”王瀚说,也是从那时起,他们开始在学校里“招兵买马”,在机器人社团做技术分享,在科创竞赛中寻找队友,甚至在社交媒体上发布项目进展,吸引有共同兴趣的同学加入。“我们不看专业背景,只要对‘用科技解决问题’有热情就行。”
青年团队成长
用技术解决实际问题
如今,团队已壮大至包括机械自动化、产品设计、生物医学工程等专业的13名成员。团队里,有擅长机械设计的同学,有精通算法的同学,还有懂产品设计的同学,跨学科的碰撞常常能擦出意想不到的火花。
随着团队壮大,项目也从“颠球机器人”拓展到更广阔的领域。在医疗领域,他们将平衡控制技术迁移到精密医疗设备上,提升设备在动态环境下的稳定性;在船舶领域,他们利用系统的抗干扰能力,帮助船上平台在晃动中保持平稳作业。“这些拓展的核心,其实都是我们在颠球机器人上验证过的算法。”王瀚说,参加“挑战杯”让团队真正明白,科创不是做酷炫的机器,而是用技术解决实际问题。回望三年科创路,让王瀚难忘的不仅有拿奖的时刻,还有无数个深夜里,团队成员围在实验台前,一起啃面包、改代码、调机器的日子。“当‘挑战杯’的评委和专家们指出我们的技术可以在医疗、工业、国防等多个领域解决实际问题时,我们深受鼓舞。”王瀚说,这段经历让他明白,科创报国不是一句口号,而是要像打磨算法一样,一步一个脚印,把青春的热爱变成解决实际问题的能力。如今,团队的智能平衡系统还在不断优化,他们的目标是让技术走进更多领域,用年轻人的创新,为国家的科技发展贡献一份力量。“我们从‘做一个酷炫的机器人’的初心,升华为‘用科技创新服务社会’的使命感。”王瀚的眼中,闪烁着属于科创青年的坚定与光芒。